STEP 01
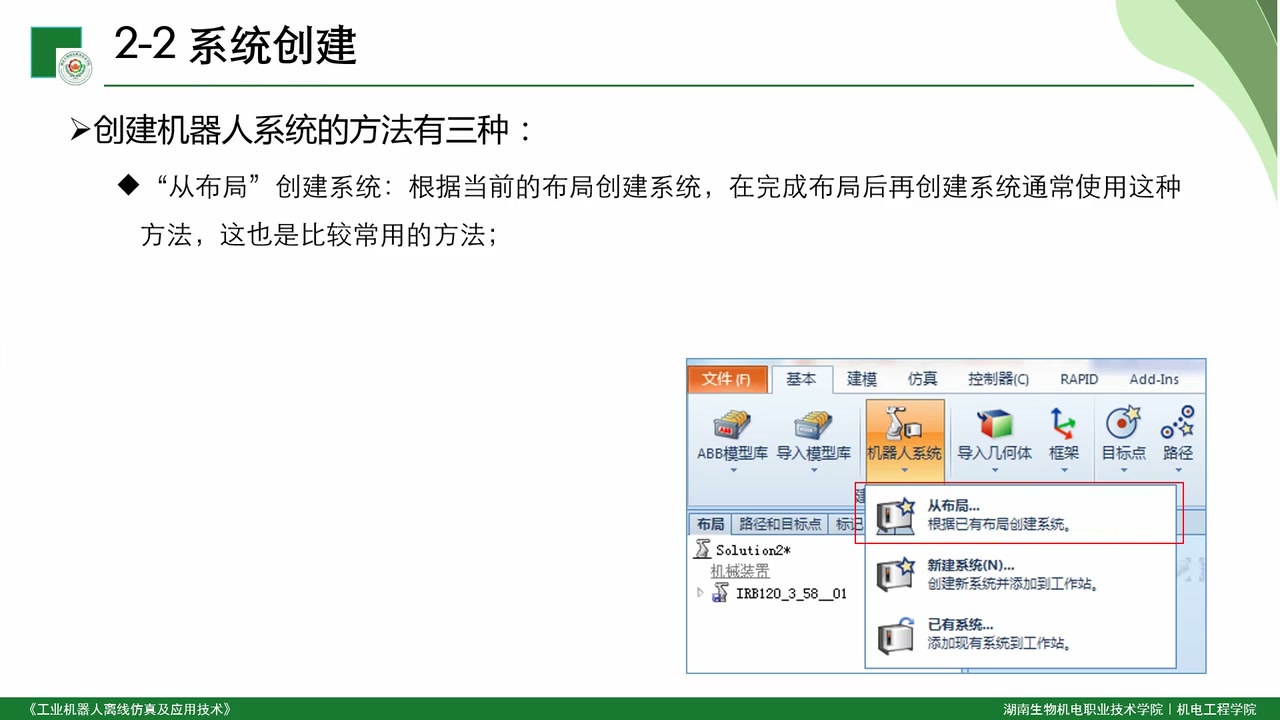
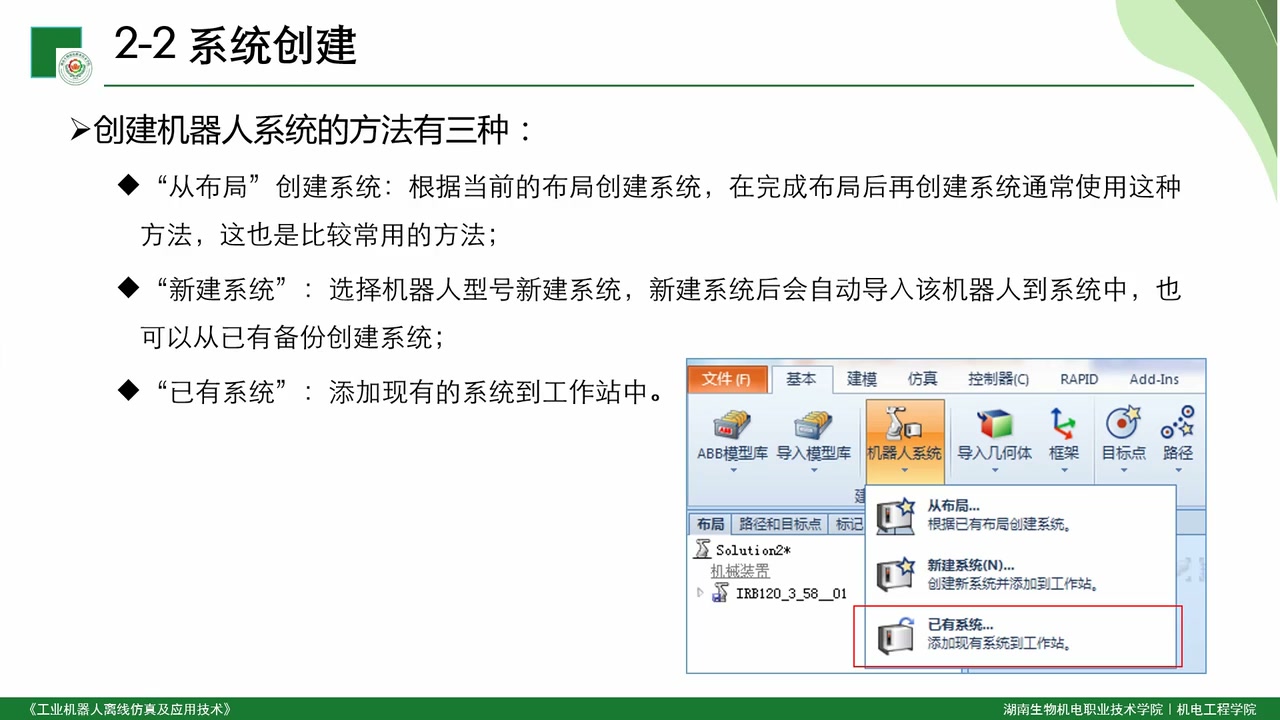
创建机器人系统
在 RobotStudio 中先完成系统创建,不然路径后面无法同步程序。
- 打开已布置好的切割工作站。
- 进入“基本 / 机器人系统 / 从布局”一类入口。
- 按向导选择当前布局里的机器人,生成控制器系统。
下面每一步都配了视频关键截图。考试时不要先急着点路径,先确认系统、工具、工件坐标和模型都在,再做自动路径。
在 RobotStudio 中先完成系统创建,不然路径后面无法同步程序。
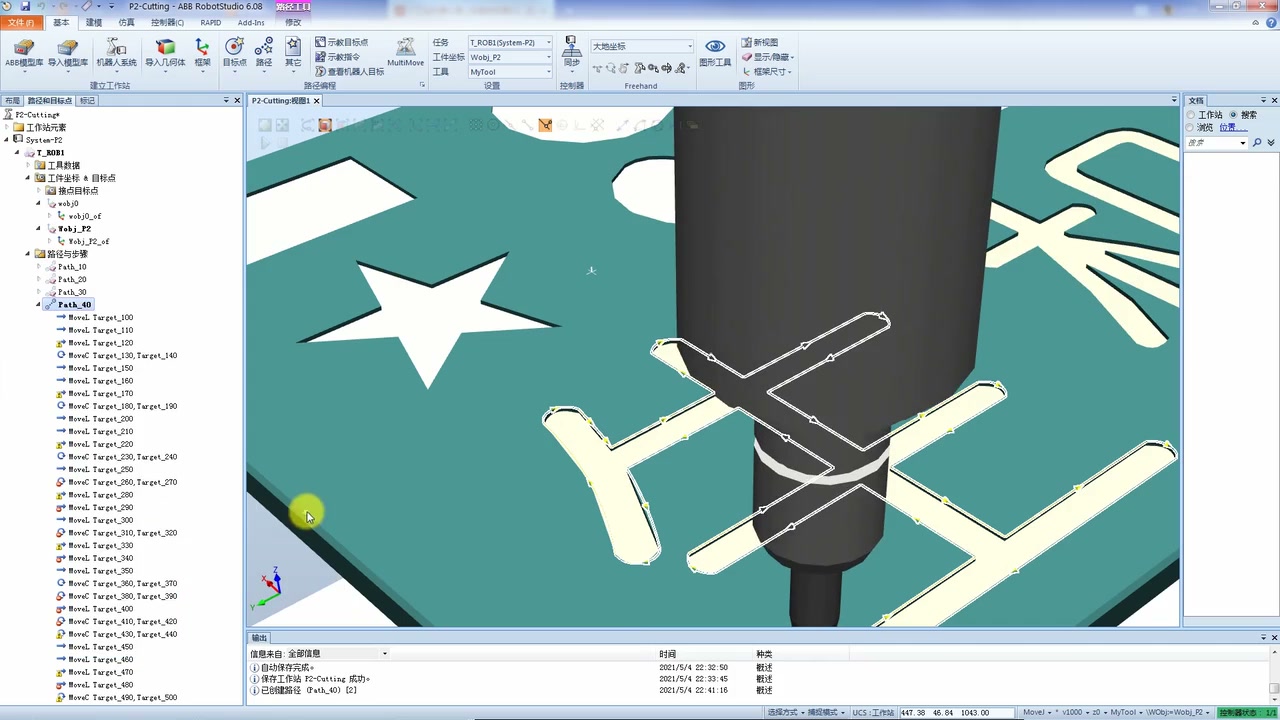
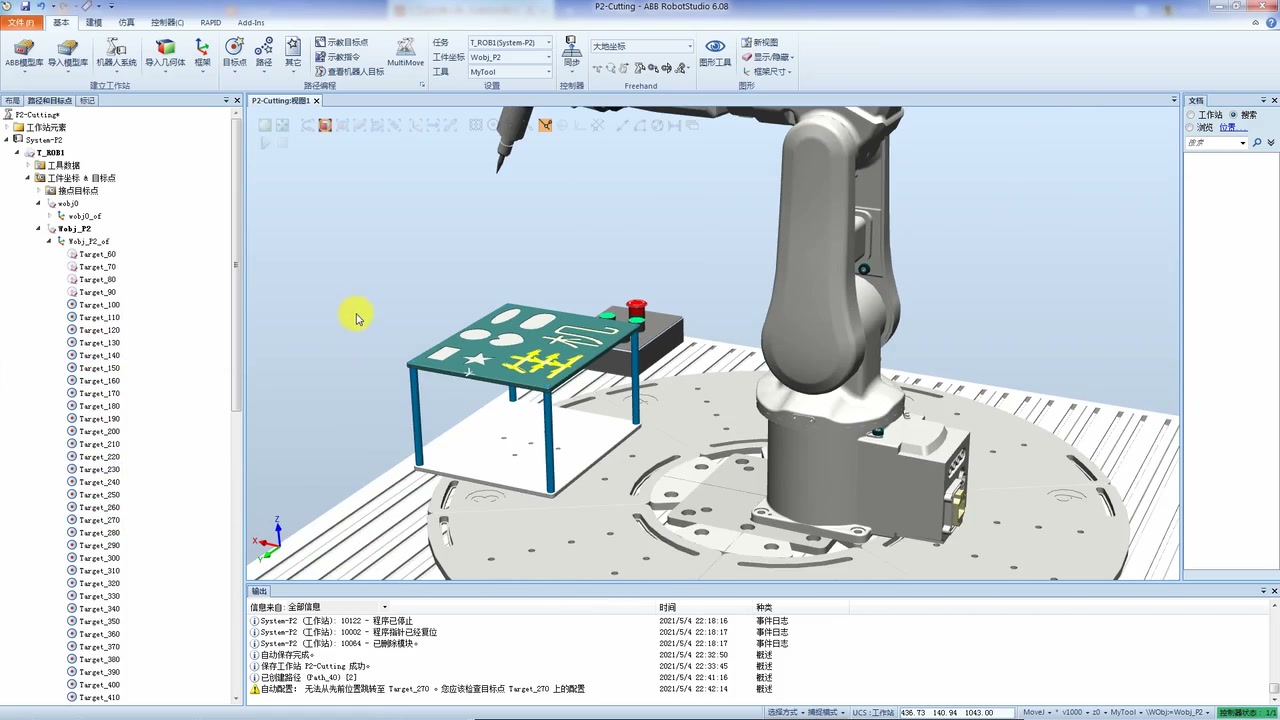
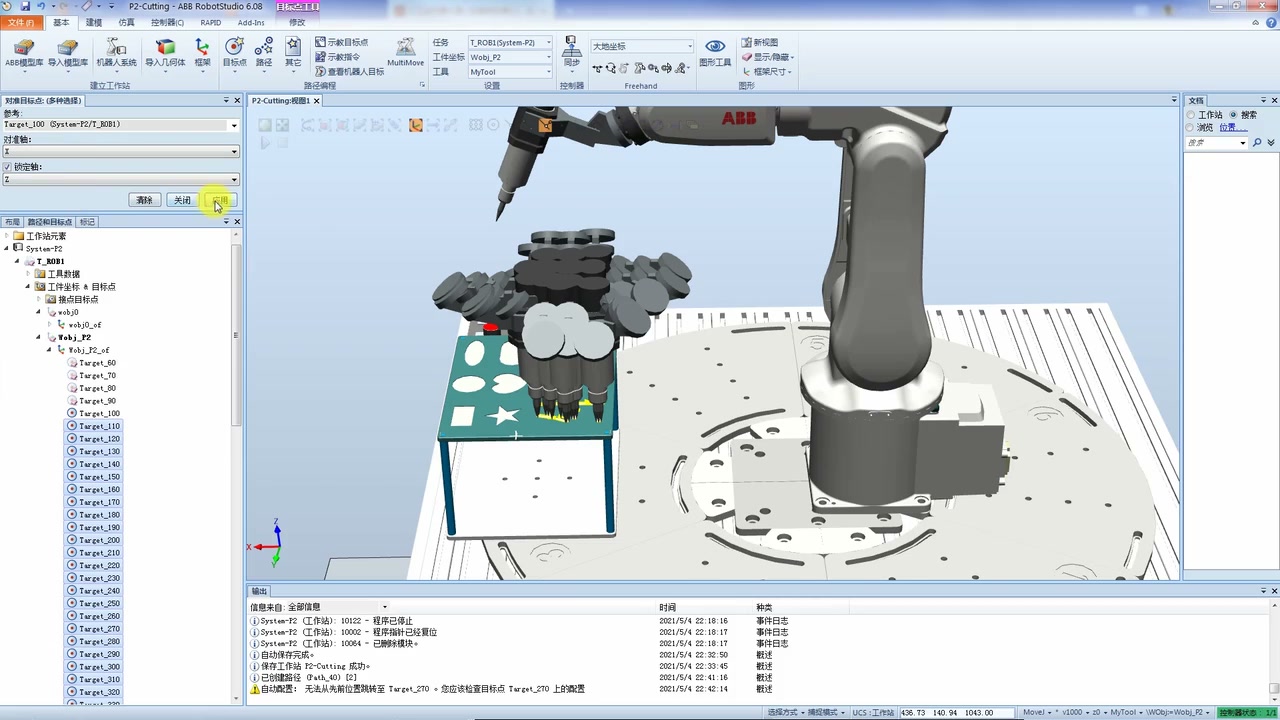
看左侧树里是否有 System、T_ROB1、工具、工件对象和路径目录。
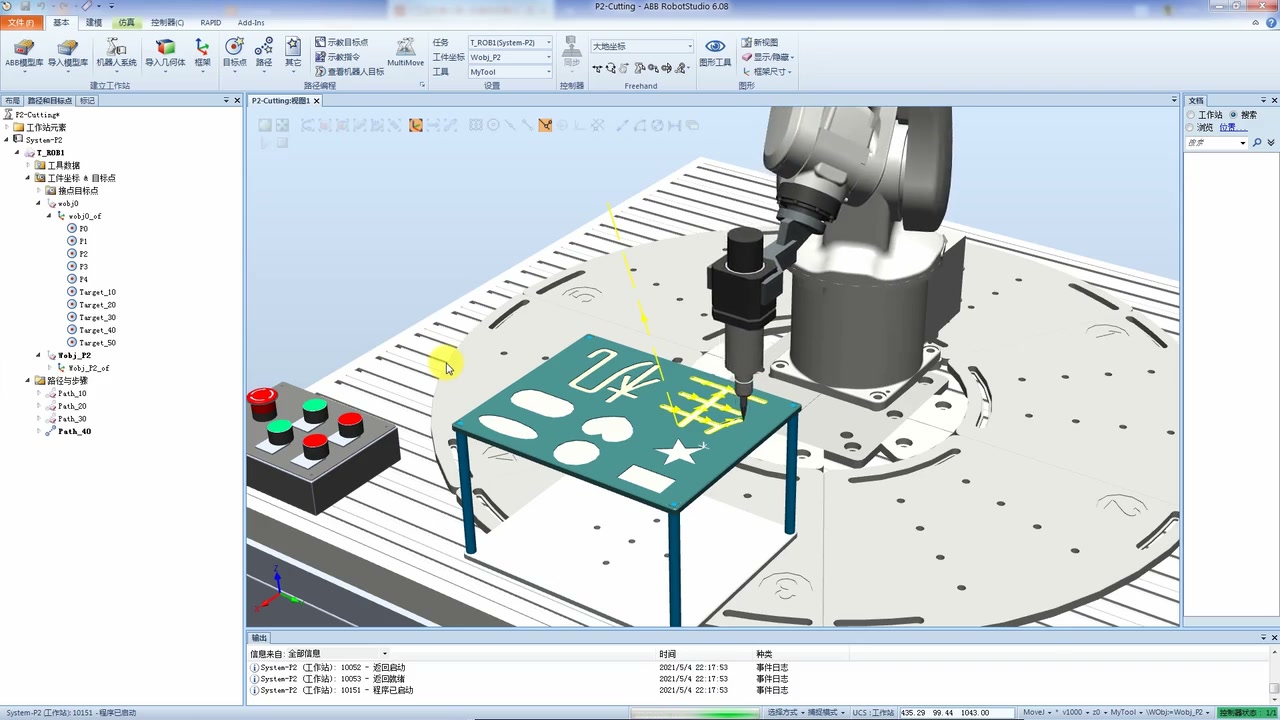
绿色板件是工件,白色图形和文字轮廓就是需要生成切割路径的位置。
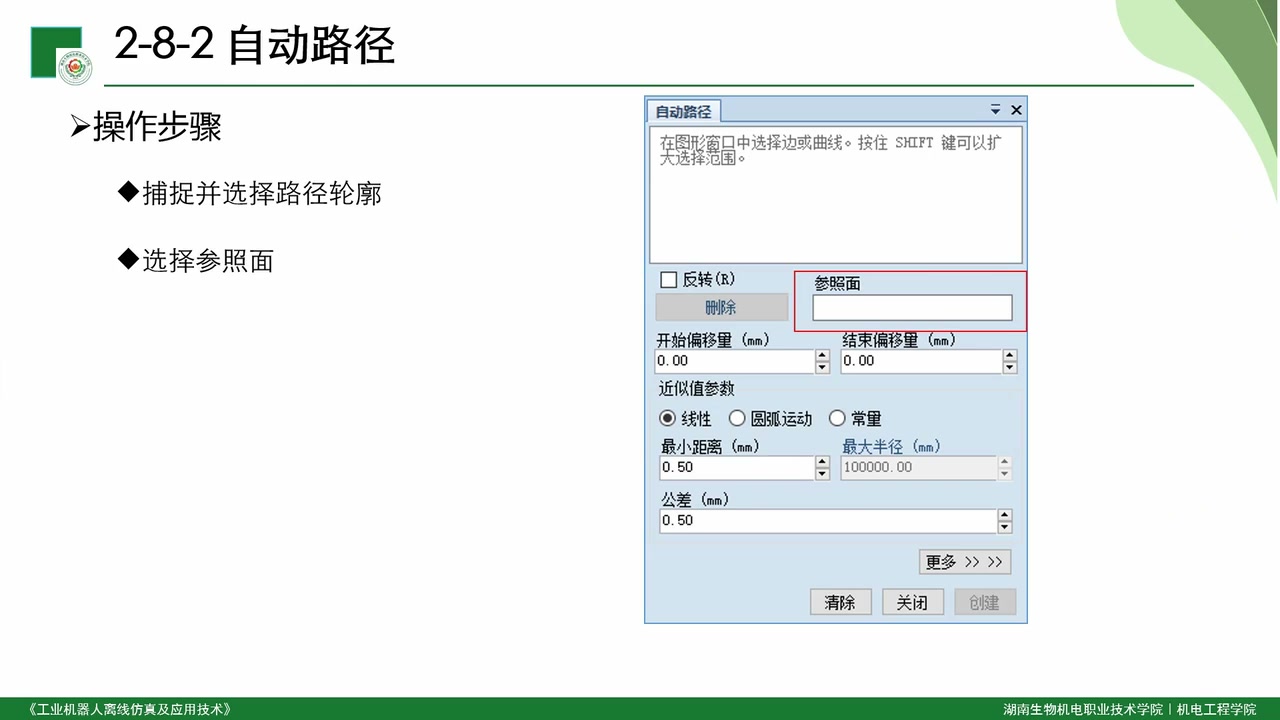
自动路径的核心是:选轮廓、选参照面、设精度、点击创建。
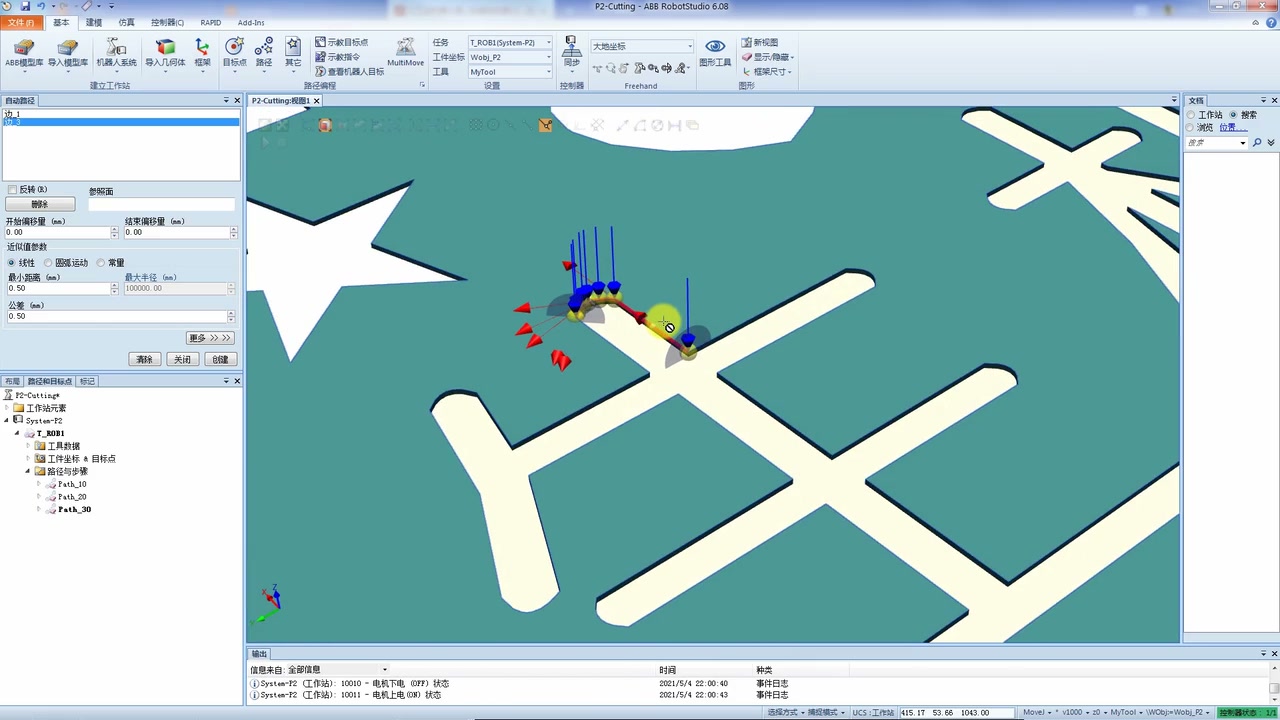
鼠标点选需要切割的边线。多个轮廓可以按住 Shift 继续追加选择。
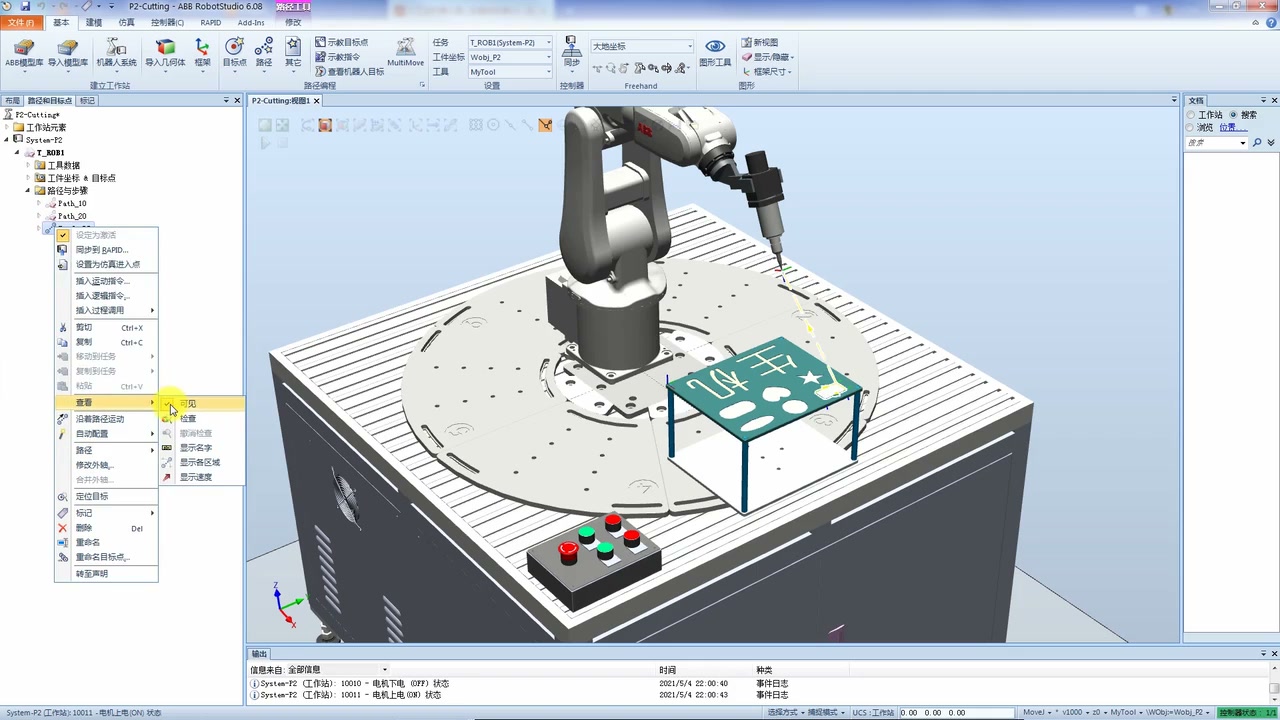
生成后会出现 Path 和 Target。右键路径可以显示、隐藏或编辑,便于检查。
切割考试最容易扣分的是工具方向错。看 TCP 是否朝向工件表面。
路径只是仿真对象,还需要同步成 RAPID 程序,机器人才能按程序运行。
最后启动仿真,看机器人是否沿图案完成切割动作。
电脑考试时可以按这个顺序检查。前一步没完成,不要跳到下一步。
这些问题在视频里的流程都能对应上,考试时重点避免。
路径能看见,但不能正常同步程序或运行控制器。先检查系统树。
文字和内部图形容易漏。选完后一定看路径是否闭合、是否完整。
参照面错了,工具方向和高度会乱,导致路径飞起来或钻进板里。
切割工具要对着工件表面,不能横着扫,也不能突然翻腕。
只创建路径不等于有程序。必须同步到 RAPID 后再运行。
最后必须运行一遍,确认机器人运动、路径顺序和切割效果。
本次切割任务先在 RobotStudio 中根据已有布局创建机器人系统,确认控制器、工具和工件对象正常;然后使用自动路径功能选择工件上的切割轮廓和参照面,生成 Path 与 Target;接着检查路径连续性和工具姿态,将路径同步到 RAPID 程序,最后运行仿真,确认机器人能沿图案完成切割且没有碰撞或漏切。